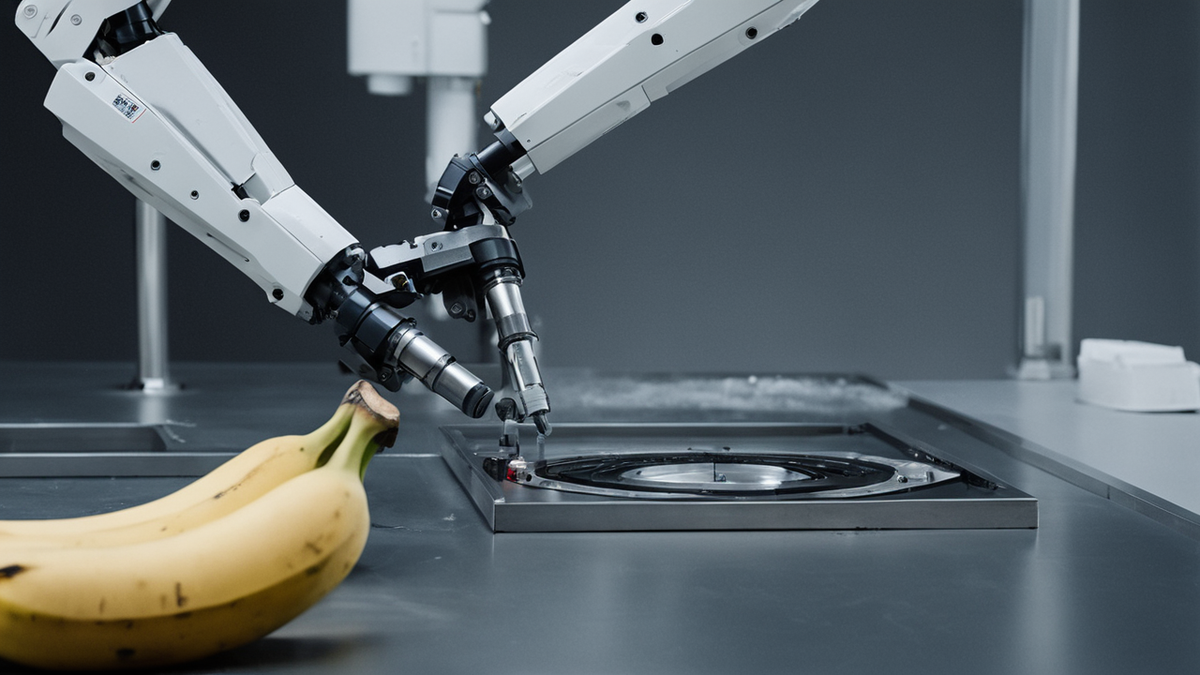

Tant que l’IA parle, tout paraît presque propre. Le réel devient plus têtu quand il faut attraper une banane, suivre la courbe d’une tasse ou faire glisser un éplucheur sans massacrer l’objet. C’est ce que raconte un sujet publié par Tech Xplore, avec une scène beaucoup plus utile qu’une promesse de salon.
Le travail vient de chercheurs liés à l’EPFL et à l’Idiap Research Institute, et il a été détaillé dans Science Robotics. Le sujet n’est pas de faire poser un robot devant une caméra. Il est de voir s’il sait transférer un geste d’un objet à un autre quand les formes changent.
La banane gagne souvent contre la démonstration
Une boîte est simple pour une machine : faces planes, angles clairs, trajectoire prévisible. Une banane, une tasse ou un outil de cuisine n’obéit pas à cette géométrie tranquille. La version scientifique disponible sur arXiv insiste justement sur ce problème : les objets courbes n’offrent pas de repère global évident.
Le cœur de la méthode consiste à construire des champs d’orientation diffusés, c’est-à-dire une manière de donner au robot des directions locales qui suivent la surface de l’objet. Le PDF de recherche hébergé par le site de Sylvain Calinon résume bien l’enjeu : apprendre des gestes qui restent valables même quand la forme n’est plus la même.

Ce que le robot apprend, ce n’est pas la banane
L’idée n’est pas d’enseigner au robot une banane parfaite, puis de recommencer avec chaque fruit tordu. Le paquet de code Diffused Fields Robotics montre l’ambition pratique : réutiliser des primitives locales pour des tâches comme peler, trancher ou couvrir une surface.
Un second dépôt, Diffused Fields, met en avant la partie plus fondamentale : calculer ces champs à partir de nuages de points. Autrement dit, le robot ne reçoit pas seulement un ordre. Il reconstruit une petite carte de l’objet qu’il a devant lui.

Le vrai progrès se voit dans les ratés
La lecture la plus intéressante n’est donc pas la fascination. C’est le seuil. Un article d’Electronics For You résume cette bascule en parlant de robots capables de manipuler des formes irrégulières en comprenant leur géométrie plutôt qu’en suivant des instructions figées. — à lire aussi : L’IA devient enfin intéressante quand elle aide des femmes à poser des questions….
Le sujet rejoint aussi un mouvement plus large de robotique souple et de manipulation en environnement réel. Le programme de RoboSoft 2026 met par exemple en avant des défis comme la récolte de fruits mûrs, où l’objet est fragile, variable et rarement bien disposé pour la machine.
Reste une limite très saine : ces systèmes ne transforment pas encore une cuisine en atelier autonome. Ils déplacent plutôt la frontière entre démonstration et usage. La promesse devient plus crédible quand elle accepte de commencer par une banane qui glisse, une tasse qui tourne et un éplucheur qui ne pardonne pas grand-chose.
Article créé en collaboration avec l’IA.